The integrated FuSa and SOTIF workflow start with an initial hazard analysis and an investigation for potential hazards – caused by failures or limitations of the nominal performance – across the system architecture. For example, fog, snow, rain, and other weather conditions can confuse the sensor’s perception capabilities into “viewing” a physical object where there is none. It can trigger risky behavior such as strong braking, which results in a rear collision with another vehicle. Even more disastrous, a sensor might interpret an actual physical object on the road as an illusion, which results in the crash of a vehicle with the physical object. Medini Analyze focus at every identified hazard and utilizes key parameters like “incident severity” to classify the risk level. Additionally, it distinguishes critical safety hazards and addresses them accordingly.
Ansys Medini Analyze can also address causal analysis, looking at the example, “Why is this critical performance flaw occurring?” This analysis is similar to the functional safety analysis that automotive engineering teams have been conducting for a decade and includes well-known techniques from functional safety analysis, such as fault trees and guideword analysis.
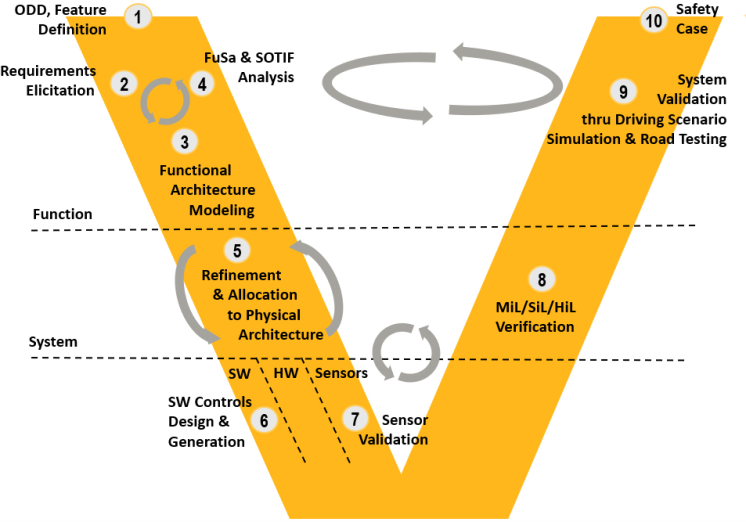
Ansys Medini Analyze also allows traceability linkage between safety analysis and complete system architecture. It automates the allocation of the malfunctioning behavior to a specific functional block or multiple blocks. Whatever the cause, whether it is performance shortfall or a software bug, or a sensor performance limitation – Medini Analyze defines the areas where sensors functionality is not delivered. Because Medini Analyze model limitations and triggering conditions can be used in causal nets or fault tree analysis. Over this period, engineers can accumulate knowledge and lessons learned. Integrating all these findings with the previous validation activities, simulations, or virtual road tests could trigger conditions that may express in one or two words, like “sun glare” or “snow.” Others are much more complex, such as “metal object on the pavement causing a reflection from the headlights in night-time conditions” or “driving out of a tunnel at high speed.” These more complex triggering conditions can be modeled by Medini Analyze as scenarios. These scenarios are modeled in Medini using SysML diagrams, where scenes and events are represented through pictograms.
Triggering conditions and scenarios will also be exported from Medini Analyze into different formats, and then it can be imported into scenario generators for simulation. Scenarios that have been identified as potential triggers for risky behavior provide valuable inputs to product developers, simulation experts, and physical testing team members. It will enable them to investigate and address every causal effect and provides the outcomes to safety analysts, and determine parameters (e.g., critical position, speed, and distance, weather conditions).
The new SOTIF standard will also cover Human-Machine Interaction (HMI) and hazards arising from misunderstandings and even intentional misuse of the HMIs. Medini Analyze can also address these concerns, general cybersecurity issues that fall outside the scope of ISO 21448 but may still be important in the horizon of autonomous vehicle development.